随着现代城市化进程加快,地面清扫工作日趋繁重,人工清扫劳动强度大、效率低、成本高,不再适用于大面积区域清扫,推行智能化清扫已成必然趋势。
本项目旨在解决制约我国环卫清扫车辆从机械化向智能化自动化升级的关键技术——作业路面工况实时识别问题,开发出基于机器视觉技术的路面工况识别系统和清扫设备自动控制系统,突破复杂光照条件下的路面成像、高速高精度路面垃圾分类识别等核心技术,实现智能清扫车的工程应用,提升我国的环卫清扫车辆的技术水平。
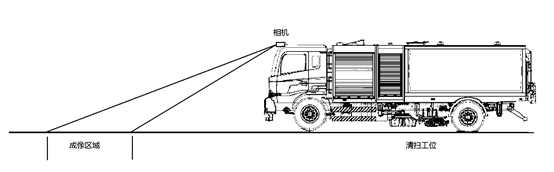
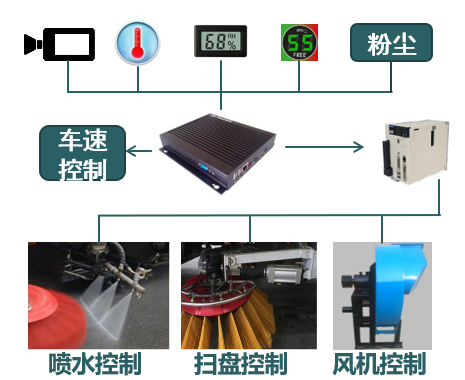
项目将研制一套安装在环卫清扫车上面的光电成像装置,对所要进行作业的路面进行视觉识别处理,主要是对路面树叶、泥沙、生活垃圾等垃圾杂质进行识别,并进行运算处理装换位清洁度数据,然后把相关数据传输给上装控制器,上装控制器在根据清洁度数据匹配车、速控制风机、扫盘、水泵等设备进行自适应控制,降低能耗、提高作业里程,实现清扫车的全自动化作业,最终结合自动驾驶实现无人清扫作业。
基于机器视觉的智能路面识别
实现清扫作业过程的智能化自动化,关键是要实现对作业区域的精准探测,获取路面垃圾种类、尺度、分布特征、路面含水量(湿度)、灰尘状况的等信息,据此给出优化的清扫作业参数和合理的作业模式,从而取得高效环保的作业效果。在现有的探测技术中,机器视觉技术优势独特,可以获取被测目标的色彩信息、亮度信息、几何信息和空间分布信息,检测速度快,并且是非接触测量,测量区域和测量精度可控,是实现路面垃圾信息探测的唯一可行的技术途径。
自适应学习算法
通过自适应学习算法,智能清扫车实现作业模式切换自主化。针对路况、环境温湿度等非线性时变信息,利用神经网络对任意非线性函数的逼近能力,建立基于RBF神经网络的自适应PID控制算法,自动调节清扫速度、冲洗用水量、扫盘转速、风机功率等,使得该车适用于多种路况,保证每小时清扫能力达19000平方米,作业洁净率≥98.5%。
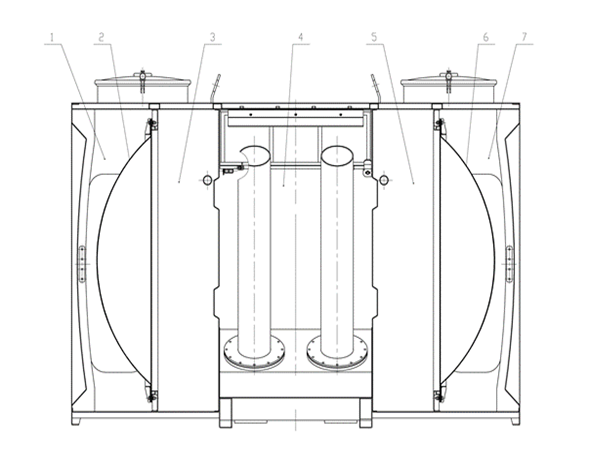
变容箱体设计理念
清水箱与污水箱间安装软体布,其位置随清水箱与污水箱水位变化自动调节,达到增容目的,清水箱容积达10.3立方米,垃圾箱容积达8.0立方米,加满一箱清水可连续作业2小时,相较于同类型车辆作业时间延长20%以上,连续作业时间国内领先。通过变容箱体设计理念,实现续航作业最大化。

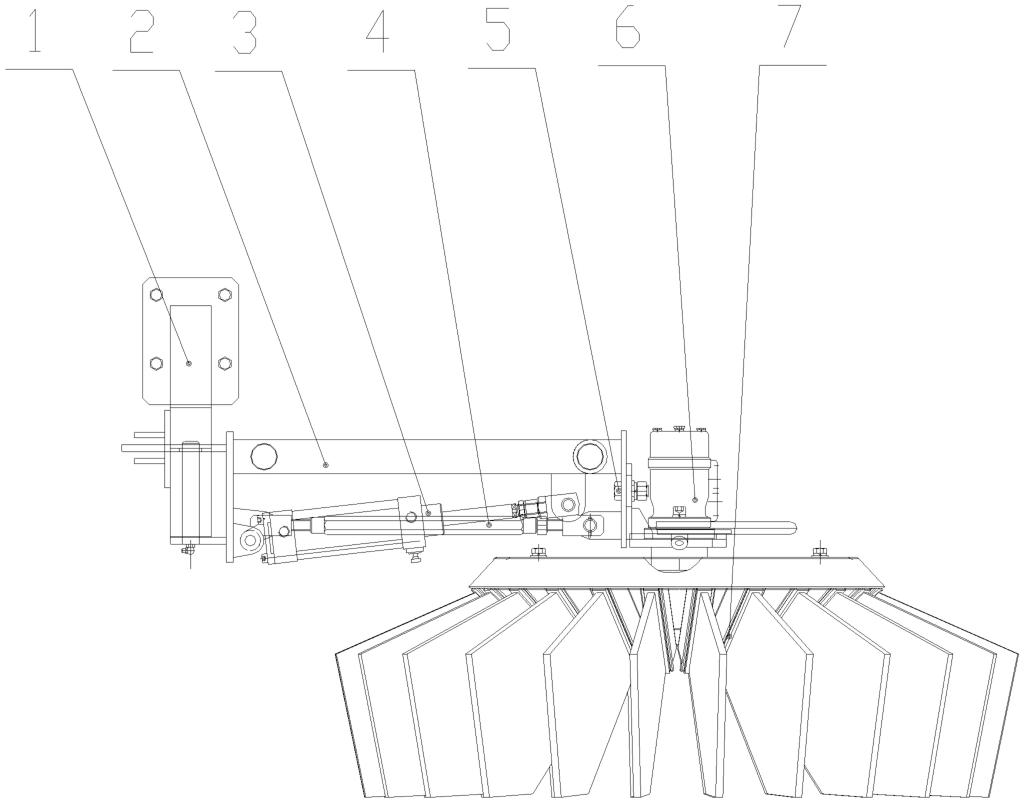
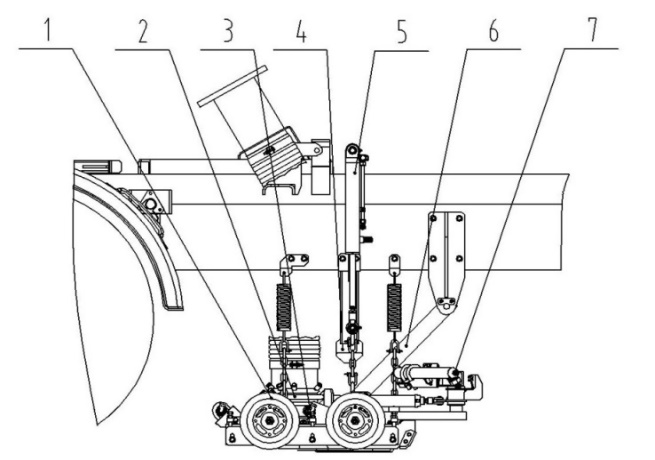
扫盘、吸嘴优化设计
清扫机构可根据路面情况及扫毛磨损程度自行调节扫盘与地面高度,有效延长扫毛使用寿命,降低清扫车使用维护成本;通过仿真优化吸嘴内部气体流场及结构,吸拾能力提高了10%,且可实现随动,不受底盘载荷变化影响。